| diagram | 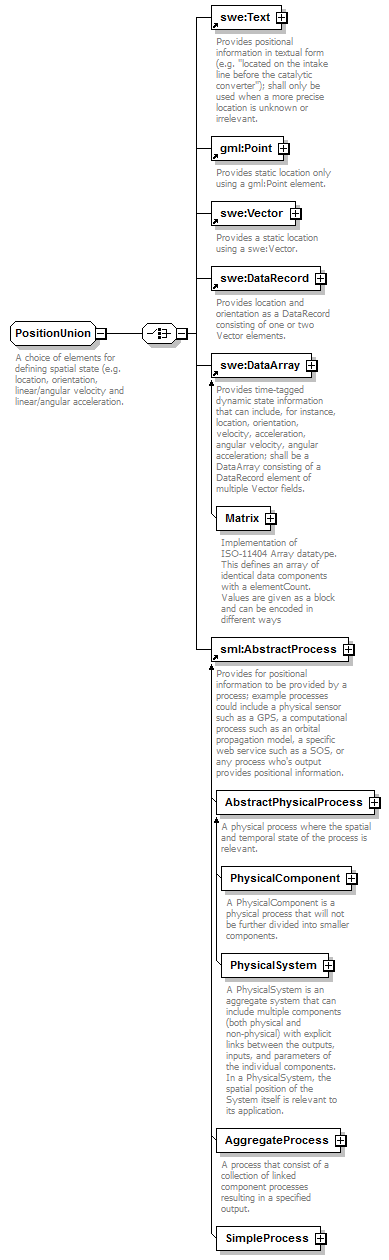 |
||
| namespace | http://www.opengis.net/sensorML/2.0 | ||
| children | swe:Text gml:Point swe:Vector swe:DataRecord swe:DataArray sml:AbstractProcess | ||
| used by |
|
||
| annotation |
|
||
| source | <group name="PositionUnion"> <annotation> <documentation>A choice of elements for defining spatial state (e.g. location, orientation, linear/angular velocity and linear/angular acceleration.</documentation> </annotation> <choice> <element ref="swe:Text"> <annotation> <documentation>Provides positional information in textual form (e.g. "located on the intake line before the catalytic converter"); shall only be used when a more precise location is unknown or irrelevant.</documentation> </annotation> </element> <element ref="gml:Point"> <annotation> <documentation>Provides static location only using a gml:Point element.</documentation> </annotation> </element> <element ref="swe:Vector"> <annotation> <documentation>Provides a static location using a swe:Vector.</documentation> </annotation> </element> <element ref="swe:DataRecord"> <annotation> <documentation>Provides location and orientation as a DataRecord consisting of one or two Vector elements.</documentation> </annotation> </element> <element ref="swe:DataArray"> <annotation> <documentation>Provides time-tagged dynamic state information that can include, for instance, location, orientation, velocity, acceleration, angular velocity, angular acceleration; shall be a DataArray consisting of a DataRecord element of multiple Vector fields.</documentation> </annotation> </element> <element ref="sml:AbstractProcess"> <annotation> <documentation>Provides for positional information to be provided by a process; example processes could include a physical sensor such as a GPS, a computational process such as an orbital propagation model, a specific web service such as a SOS, or any process who's output provides positional information.</documentation> </annotation> </element> </choice> </group> |
XML Schema documentation generated by XMLSpy Schema Editor http://www.altova.com/xmlspy