| diagram | 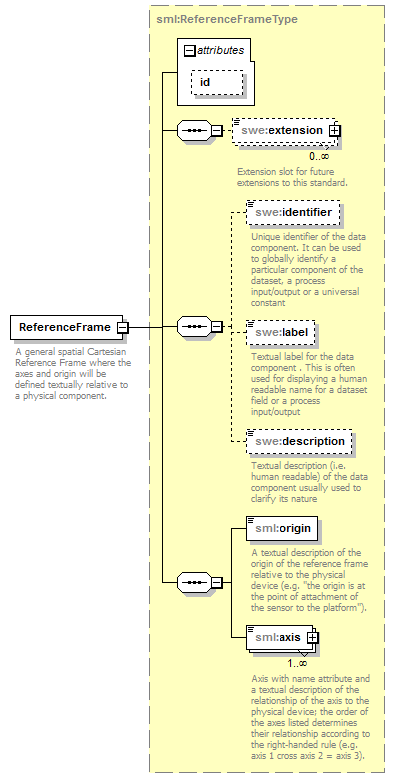 |
||||||||||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||||||||||
| type | sml:ReferenceFrameType | ||||||||||||
| properties |
|
||||||||||||
| children | swe:extension swe:identifier swe:label swe:description sml:origin sml:axis | ||||||||||||
| used by |
|
||||||||||||
| attributes |
|
||||||||||||
| annotation |
|
||||||||||||
| source | <element name="ReferenceFrame" type="sml:ReferenceFrameType" substitutionGroup="swe:AbstractSWEIdentifiable"> <annotation> <documentation>A general spatial Cartesian Reference Frame where the axes and origin will be defined textually relative to a physical component.</documentation> </annotation> </element> |
XML Schema documentation generated by XMLSpy Schema Editor http://www.altova.com/xmlspy