| diagram |  |
||||||||||||||||||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||||||||||||||||||
| type | extension of sml:AbstractProcessType | ||||||||||||||||||||
| properties |
|
||||||||||||||||||||
| children | gml:metaDataProperty gml:description gml:descriptionReference gml:identifier gml:name gml:boundedBy gml:location sml:extension sml:keywords sml:identification sml:classification sml:validTime sml:securityConstraints sml:legalConstraints sml:characteristics sml:capabilities sml:contacts sml:documentation sml:history sml:typeOf sml:configuration sml:featuresOfInterest sml:inputs sml:outputs sml:parameters sml:modes sml:attachedTo sml:localReferenceFrame sml:temporalReferenceFrame sml:position | ||||||||||||||||||||
| used by |
|
||||||||||||||||||||
| attributes |
|
||||||||||||||||||||
| source | <complexType name="AbstractPhysicalProcessType" abstract="true"> <complexContent> <extension base="sml:AbstractProcessType"> <sequence> <element name="attachedTo" type="gml:ReferenceType" minOccurs="0" maxOccurs="1"> <annotation> <appinfo> <gml:targetElement>sml:AbstractPhysicalProcess</gml:targetElement> </appinfo> <documentation>References the physical component or system (e.g. platform) to which to which this component or system is attached.</documentation> </annotation> </element> <element name="localReferenceFrame" minOccurs="0" maxOccurs="1"> <annotation> <documentation>A spatial reference frame of the physical component itself; this reference frame is absolute and defines the relationship of the reference frame to the physical body of the component; position of the component relates this reference frame to some external reference frame.</documentation> </annotation> <complexType> <sequence> <element ref="sml:ReferenceFrame"/> </sequence> </complexType> </element> <element name="temporalReferenceFrame" minOccurs="0" maxOccurs="unbounded"> <annotation> <documentation>supports local time reference frames such as "milliseconds past mission start"</documentation> </annotation> <complexType> <sequence> <element ref="gml:TimeReferenceSystem"/> </sequence> </complexType> </element> <element name="position" type="sml:PositionUnionPropertyType" minOccurs="0" maxOccurs="1"> <annotation> <documentation>Provides positional information relating the component's spatial reference frame to an external spatial reference frame. Positional information can be given by location, by full body state, by a time-tagged trajectory, or by a measuring or computational process.</documentation> </annotation> </element> </sequence> </extension> </complexContent> </complexType> |
element AbstractPhysicalProcessType/attachedTo
| diagram | 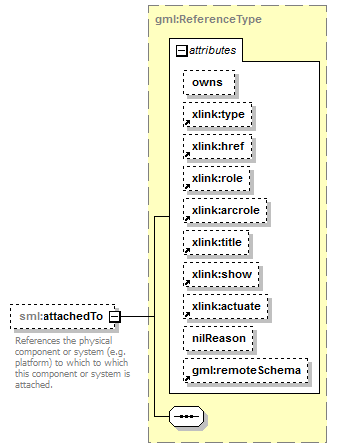 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| type | gml:ReferenceType | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| properties |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| attributes |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| annotation |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| source | <element name="attachedTo" type="gml:ReferenceType" minOccurs="0" maxOccurs="1"> <annotation> <appinfo> <gml:targetElement>sml:AbstractPhysicalProcess</gml:targetElement> </appinfo> <documentation>References the physical component or system (e.g. platform) to which to which this component or system is attached.</documentation> </annotation> </element> |
element AbstractPhysicalProcessType/localReferenceFrame
| diagram | 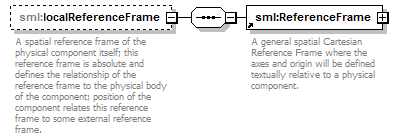 |
||||||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||||||
| properties |
|
||||||||
| children | sml:ReferenceFrame | ||||||||
| annotation |
|
||||||||
| source | <element name="localReferenceFrame" minOccurs="0" maxOccurs="1"> <annotation> <documentation>A spatial reference frame of the physical component itself; this reference frame is absolute and defines the relationship of the reference frame to the physical body of the component; position of the component relates this reference frame to some external reference frame.</documentation> </annotation> <complexType> <sequence> <element ref="sml:ReferenceFrame"/> </sequence> </complexType> </element> |
element AbstractPhysicalProcessType/temporalReferenceFrame
| diagram | 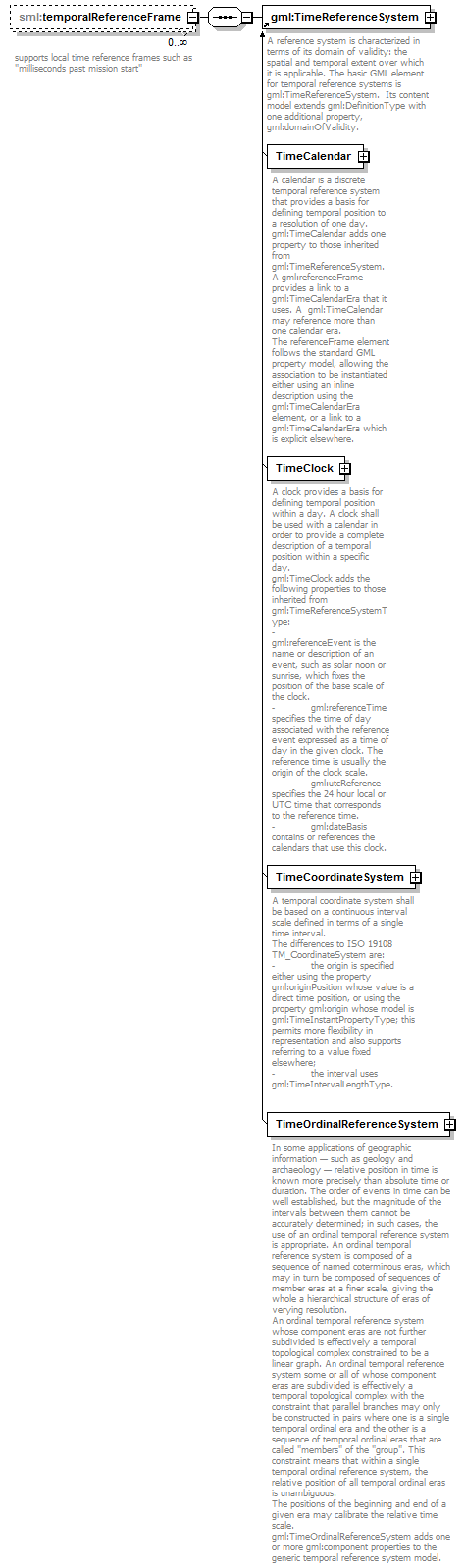 |
||||||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||||||
| properties |
|
||||||||
| children | gml:TimeReferenceSystem | ||||||||
| annotation |
|
||||||||
| source | <element name="temporalReferenceFrame" minOccurs="0" maxOccurs="unbounded"> <annotation> <documentation>supports local time reference frames such as "milliseconds past mission start"</documentation> </annotation> <complexType> <sequence> <element ref="gml:TimeReferenceSystem"/> </sequence> </complexType> </element> |
element AbstractPhysicalProcessType/position
| diagram | 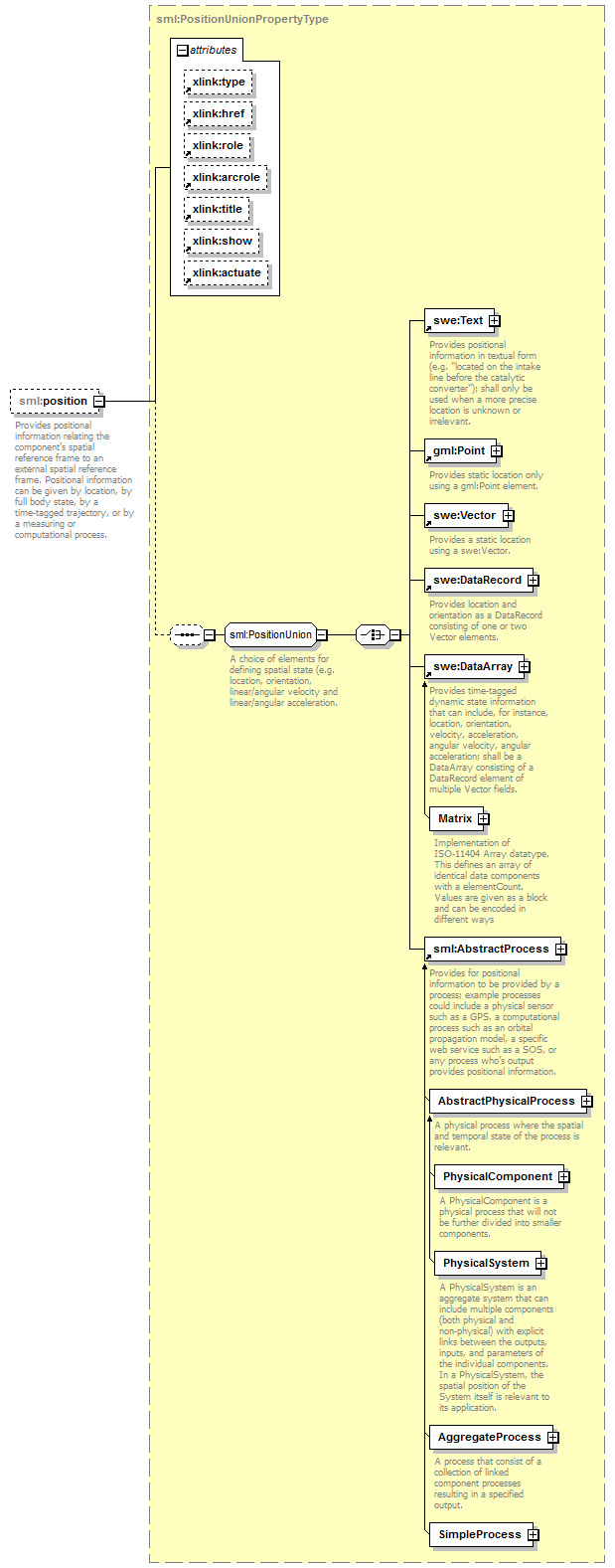 |
||||||||||||||||||||||||||||||||||||||||||||||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||||||||||||||||||||||||||||||||||||||||||||||
| type | sml:PositionUnionPropertyType | ||||||||||||||||||||||||||||||||||||||||||||||||
| properties |
|
||||||||||||||||||||||||||||||||||||||||||||||||
| children | swe:Text gml:Point swe:Vector swe:DataRecord swe:DataArray sml:AbstractProcess | ||||||||||||||||||||||||||||||||||||||||||||||||
| attributes |
|
||||||||||||||||||||||||||||||||||||||||||||||||
| annotation |
|
||||||||||||||||||||||||||||||||||||||||||||||||
| source | <element name="position" type="sml:PositionUnionPropertyType" minOccurs="0" maxOccurs="1"> <annotation> <documentation>Provides positional information relating the component's spatial reference frame to an external spatial reference frame. Positional information can be given by location, by full body state, by a time-tagged trajectory, or by a measuring or computational process.</documentation> </annotation> </element> |
XML Schema documentation generated by XMLSpy Schema Editor http://www.altova.com/xmlspy