| diagram | 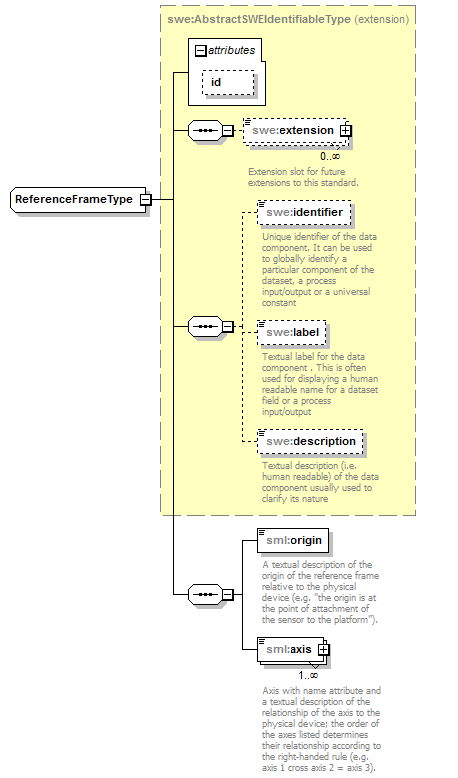 |
||||||||||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||||||||||
| type | extension of swe:AbstractSWEIdentifiableType | ||||||||||||
| properties |
|
||||||||||||
| children | swe:extension swe:identifier swe:label swe:description sml:origin sml:axis | ||||||||||||
| used by |
|
||||||||||||
| attributes |
|
||||||||||||
| source | <complexType name="ReferenceFrameType"> <complexContent> <extension base="swe:AbstractSWEIdentifiableType"> <sequence> <element name="origin" type="string"> <annotation> <documentation>A textual description of the origin of the reference frame relative to the physical device (e.g. "the origin is at the point of attachment of the sensor to the platform").</documentation> </annotation> </element> <element name="axis" minOccurs="1" maxOccurs="unbounded"> <annotation> <documentation>Axis with name attribute and a textual description of the relationship of the axis to the physical device; the order of the axes listed determines their relationship according to the right-handed rule (e.g. axis 1 cross axis 2 = axis 3).</documentation> </annotation> <complexType> <simpleContent> <extension base="string"> <attribute name="name" type="NCName" use="required"/> </extension> </simpleContent> </complexType> </element> </sequence> </extension> </complexContent> </complexType> |
element ReferenceFrameType/origin
| diagram |  |
||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||
| type | string | ||||
| properties |
|
||||
| annotation |
|
||||
| source | <element name="origin" type="string"> <annotation> <documentation>A textual description of the origin of the reference frame relative to the physical device (e.g. "the origin is at the point of attachment of the sensor to the platform").</documentation> </annotation> </element> |
element ReferenceFrameType/axis
| diagram | 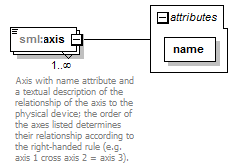 |
||||||||||||
| namespace | http://www.opengis.net/sensorML/2.0 | ||||||||||||
| type | extension of string | ||||||||||||
| properties |
|
||||||||||||
| attributes |
|
||||||||||||
| annotation |
|
||||||||||||
| source | <element name="axis" minOccurs="1" maxOccurs="unbounded"> <annotation> <documentation>Axis with name attribute and a textual description of the relationship of the axis to the physical device; the order of the axes listed determines their relationship according to the right-handed rule (e.g. axis 1 cross axis 2 = axis 3).</documentation> </annotation> <complexType> <simpleContent> <extension base="string"> <attribute name="name" type="NCName" use="required"/> </extension> </simpleContent> </complexType> </element> |
attribute ReferenceFrameType/axis/@name
| type | NCName | ||||
| properties |
|
||||
| source | <attribute name="name" type="NCName" use="required"/> |
XML Schema documentation generated by XMLSpy Schema Editor http://www.altova.com/xmlspy